2023 – April
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

Attribute: By Col André Kritzinger, CC BY-SA 3.0, https://commons.wikimedia.org/w/index.php?curid=44609676
{mb_article_wysiwyg_qbcow9tkcv}


{mb_article_wysiwyg_qbcow9tkcv}

Namibia International Energy Conference (NIEC) 2023 Explores Namibia’s Potential as a Regional Logistics Hub
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}
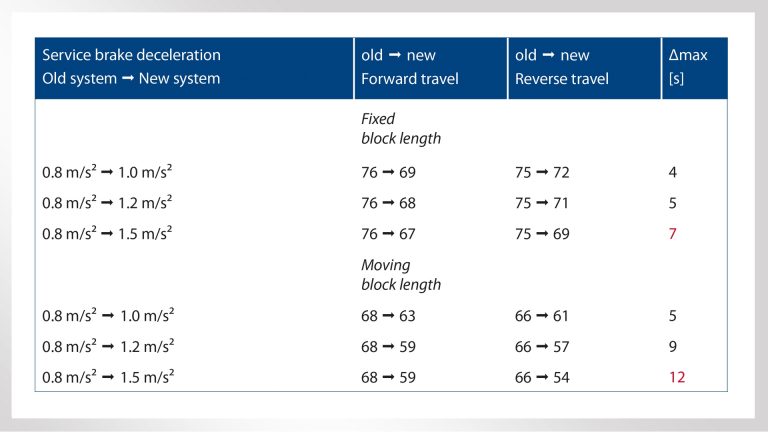
Table 1: Exemplary time gain in seconds in a metro simulation sequence 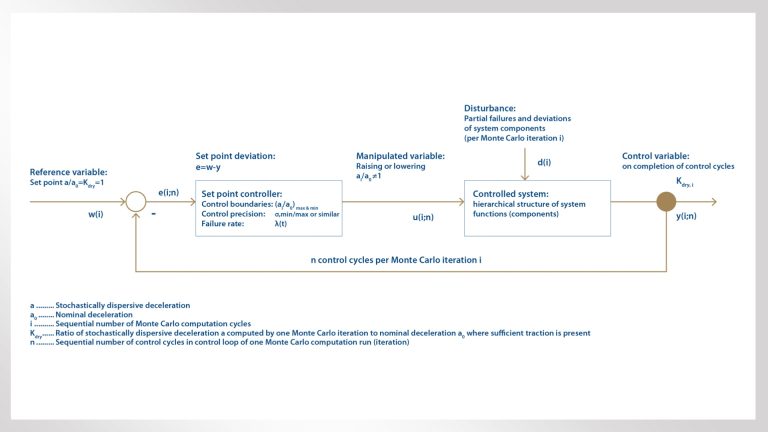
Figure 1: Control loop in the Monte Carlo simulation context, e. g. for the determination of Kdry 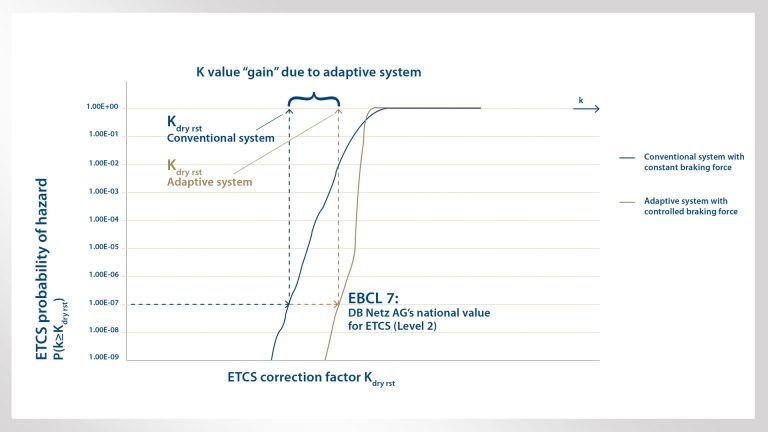
Figure 2: Kdry_rst “gain” by adaptive systems and integration of brake force control circuits into the Monte Carlo K-value determination
{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}



{mb_article_wysiwyg_qbcow9tkcv}

{mb_article_wysiwyg_qbcow9tkcv}


{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

Mr. Audace Niyonzima, Minister of Finance of Burundi (centre left) and Mr. Akinwumi Adesina, President of the African Development Bank (centre right) surrounded by their respective delegations. © (Bad, April 7, 2023)
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}




{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
25
Contributor:

{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
33
Contributor:
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}

regiolis aquitaine copyright CAF_R.Mouron 
coradia Dakar copyright CAF_Jean Schweitzer
{mb_article_wysiwyg_qbcow9tkcv}





{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
{mb_article_wysiwyg_qbcow9tkcv}
39
Contributor:
{mb_article_wysiwyg_qbcow9tkcv}